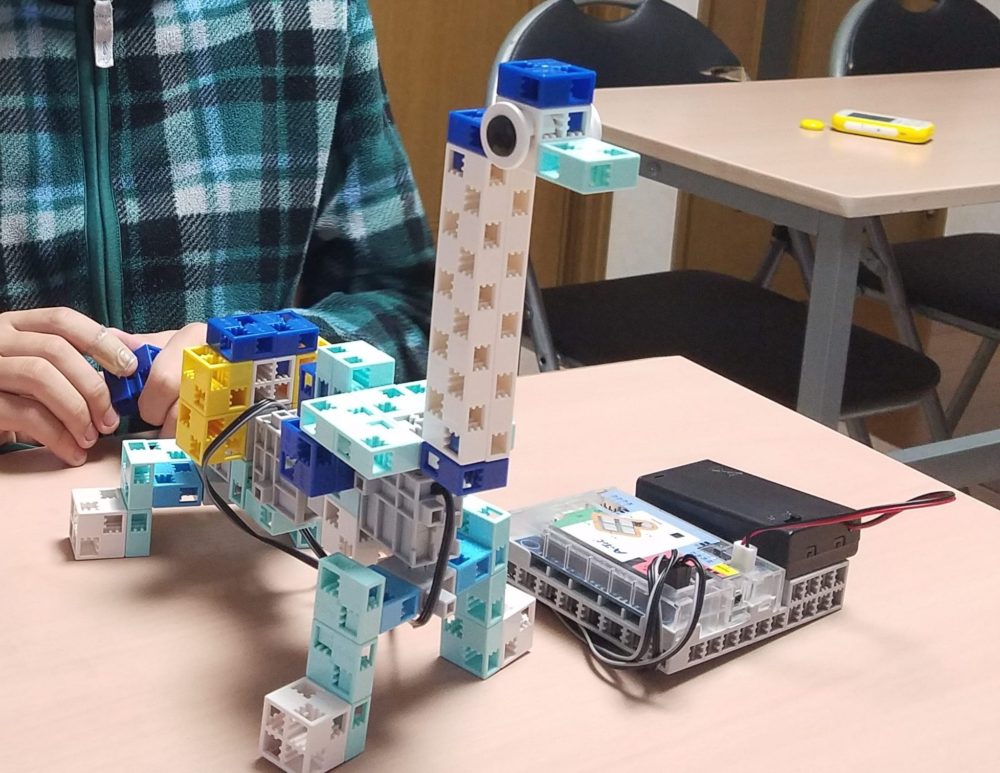
2017年11月27日 / 最終更新日 : 2017年12月28日 coursenavi プログラミング教室の様子 プログラミング,犬型歩行ロボ 11月のお題は犬型歩行ロボットです。 前足用、後足用、それぞれを浮かせるためのひねり用として、 3つのサーボモーターを連動させます。 タイミングもそうですが、重心が変わったときの角度の違いも 歩くスピードに影響します。